while EEG is recorded.
Our research focuses on integration of neural interfacing and rehabilitation robotics to improve understanding of human motor control and to develop new therapeutic tools and interventions for treatment of movement disorders and paralysis. Primary focus areas include: 1) combining neuroimaging, including electroencephalography (EEG) and functional near-infrared spectroscopy (fNIRS) with motion capture and electromyography (EMG) data collection systems to monitor brain-body dynamics during movement, 2) development and application of assistive devices and technology to improve motor function in individuals with central nervous injuries, with specific focus on actuated devices (robotics and exoskeletons) and functional electrical stimulation (FES), and 3) development and evaluation of novel rehabilitation therapies, including human-machine interaction and integration of virtual reality to enhance motor learning and functional recovery. Several active projects are described below.
Studies Actively Recruiting
Design and Evaluation of a Powered Lower-Extremity Exoskeleton
Protocol #13-CC-0210
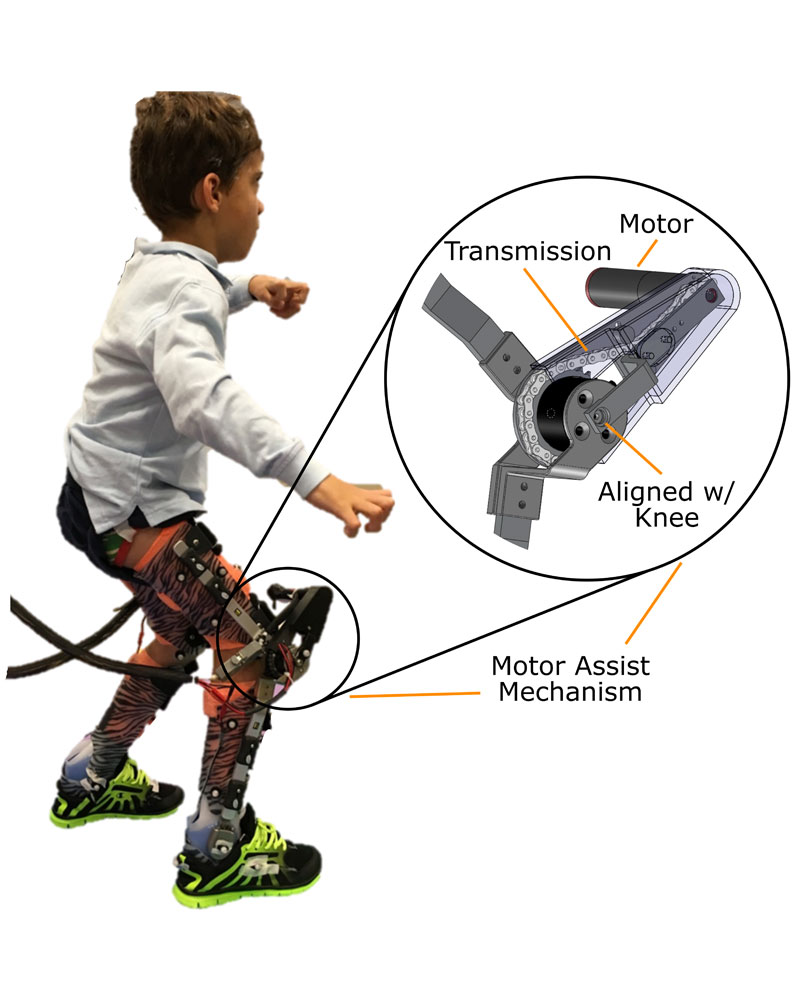
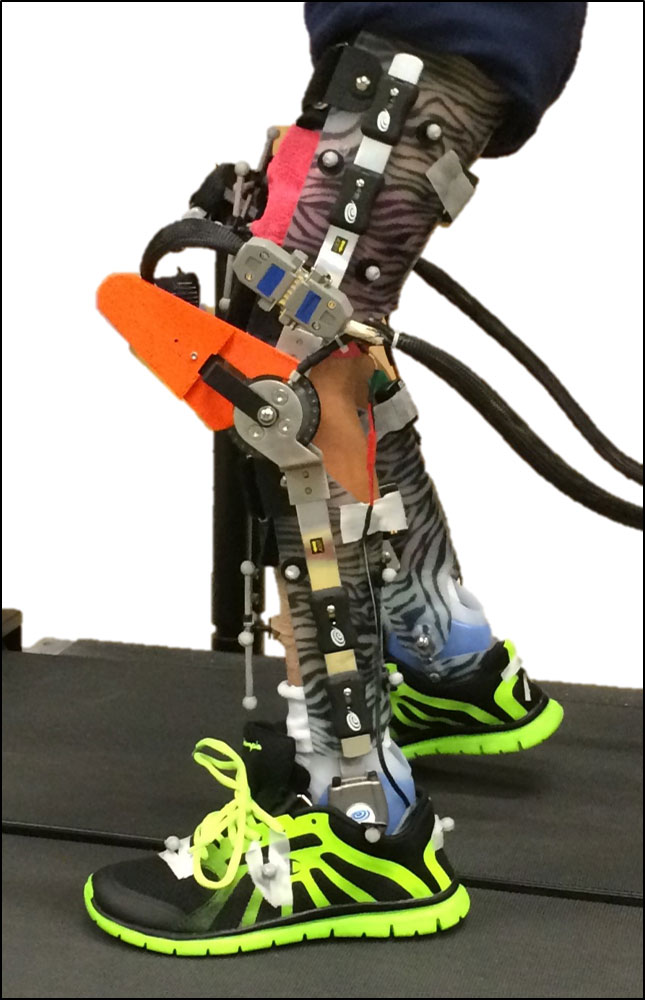
In this project, we are investigating the first lower extremity powered exoskeleton design specifically to treat children with crouch gait from cerebral palsy. Our adaptable exoskeleton was designed to evaluate powered assistance as a rehabilitation strategy for crouch. Additionally, we are studying basic science questions related to neuromuscular gait disorders and human-machine interactions. In a clinical study currently underway, we are investigating the optimal configurations and motor control strategies of our exoskeleton to assist children with CP who exhibit crouch gait, and are researching how applying powered assistance to the knee joint at different phases of the gait cycle affects joint mechanics, muscle activity, and spatiotemporal parameters. The study will compare the powered exoskeleton with traditional orthotics and functional electrical stimulation (FES). We are also combining our exoskeleton with electroencephalography (EEG) to study the ways powered assistance may affect cortical activity.